Cancro ai polmoni: nuovo broncoscopio robotico intelligente

broncoscopio robotico intelligente
Indipendentemente dalla zona interessata, il cancro ormai è noto per il suo elevato tasso di mortalità e per l’elevata incidenza in tutto il mondo. Tra questi, il cancro ai polmoni è probabilmente uno dei più letali. Secondo il World Cancer Research Fund International, il tumore ai polmoni è il secondo cancro più comune al mondo, con oltre 2,2 milioni di nuovi casi e 1,8 milioni di morti solo nel 2020.
Cancro ai polmoni: qualche dato in più
Il cancro ai polmoni, a differenza di molti altri tumori come il glioblastoma, è più facile da trattare se diagnosticato in fase iniziale. Si è stimato che il tasso di sopravvivenza ad 1 anno per lo stadio 4 è solo dal 15% al 19% rispetto all’81% all’85% per lo stadio 1. Questo dimostra che la differenziazione precoce dei noduli polmonari benigni e maligni può ridurre efficacemente la mortalità, pertanto lo screening per il cancro ai polmoni risulta di fondamentale importanza.

Il nuovo broncoscopio robotico e l’idea alla base
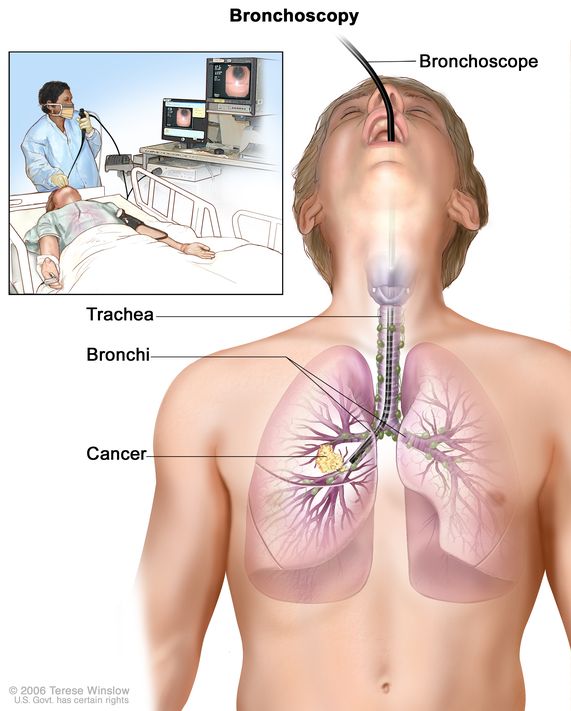
I medici ritengono che la diagnosi precoce del cancro ai polmoni sia essenziale per un trattamento tempestivo e per una prognosi migliore. A tal fine, si è ideato un nuovo prototipo di broncoscopio robotico che può accedere in modo non invasivo nell’area di interesse all’interno del polmone; questa risulta la modalità migliore per il campionamento di lesioni polmonari e semplifica le procedure attuali. Infatti, risulta più semplice inserire un lungo tubo sottile nella bocca, attraverso le vie aeree per tagliare una piccola parte della lesione di interesse all’interno del polmone che eseguire un intervento chirurgico completo. Il campione raccolto dalla procedura viene analizzato in un ulteriore esame con lo scopo di determinare se la massa tumorale è benigna o maligna. Il prototipo risulta abbastanza sottile poiché deve attraversare la trachea e i bronchi. Inoltre, deve essere in grado di piegarsi e ruotare per navigare in modo flessibile nella complessa rete di vie aeree.
Sperimentazione ex vivo
I ricercatori hanno verificato la fattibilità di questo prototipo di broncoscopio robotico tramite un esperimento di intervento assistito ex vivo. Durante l’esperimento, la posizione visualizzata dalla terza prospettiva del broncoscopio risulta coerente con la posizione della punta dell’effettore finale rispetto alle vie aeree nell’osservazione visiva. La vista dello strumento corrisponde anche al video reale acquisito dal modulo endoscopio come previsto. Sebbene il sistema abbia raggiunto promettenti prestazioni di broncoscopia come dispositivo medico, ci sono ancora alcuni problemi che limitano l’applicazione clinica. Prima di tutto, è necessaria la possibilità di utilizzare una manipolazione più semplice per i chirurghi così da facilitarne l’utilizzo; in secondo luogo, è necessaria una vista endoscopica ad alta risoluzione.

La progettazione del prototipo
Per avvicinarsi alla modalità operativa del broncoscopio convenzionale, il sistema proposto consente al broncoscopio robotico di muoversi in avanti e indietro, ruotare intorno alla direzione dell’asse e piegarsi in direzione radiale. Questo favorisce l’apprendimento clinico da parte del personale medico e la promozione nell’utilizzo ospedaliero. La struttura del meccanismo può essere divisa principalmente in 2 unità: l’effettore finale e l’unità di attuazione.
Struttura del nuovo broncoscopio robotico
Si è progettato l’effettore finale come un meccanismo continuo con diametro esterno è di 3,2 mm (inferiore al diametro esterno dei prodotti in commercio). Per via delle piccole dimensioni, è presente un solo canale di lavoro per l’installazione del modulo della telecamera e degli strumenti per biopsia; questo che può essere facilmente cambiato in base alla procedura chirurgica richiesta. Inoltre, sono presenti 2 canali del sensore di navigazione EM. La lunghezza variabile della sezione di flessione risulta variabile, questo per aumentare la flessibilità quando si passa attraverso la biforcazione delle trachea. All’esterno è presente un manicotto di PTFE con rigidità relativamente elevata e, man mano che si muove la lunghezza della sezione di flessione esposta varia aumentando lo spazio di lavoro raggiungibile dell’effettore finale. L’unità di attuazione, invece, è composta da 2 fili Ni-Ti con un diametro di 0,24 mm. Due molle elicoidali vengono aggiunte per realizzare la capacità di rigidità variabile, consentendo al sistema robotico proposto di cambiare la rigidità a causa di diverse esigenze nelle diverse fasi della chirurgia della biopsia.

Perché il nuovo sistema è innovativo per il cancro ai polmoni?
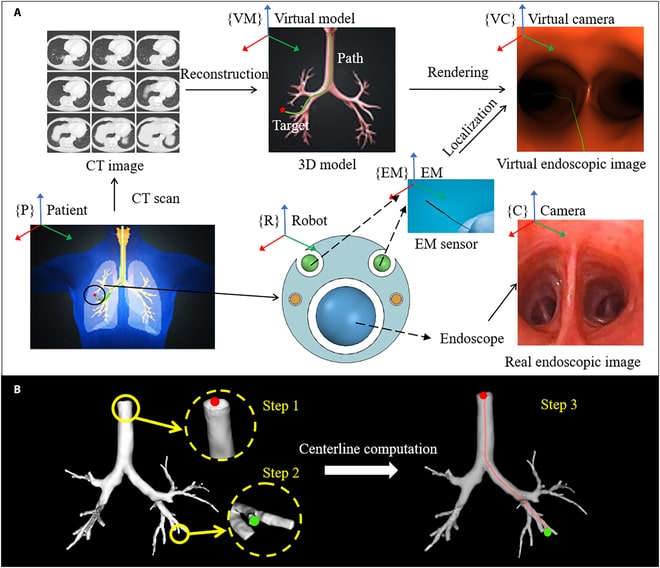
La possibile modifica del cambio di rigidità risulta fondamentale, ad esempio, è necessaria una bassa rigidità durante il processo di raggiungimento della posizione bersaglio sotto la navigazione, mentre una elevata rigidità per preservare la forma e la posizione durante il processo di inserimento dell’ago per biopsia e del campionamento. Il sistema di navigazione ricostruisce un modello virtuale tridimensionale basato sulla tomografia computerizzata per la pianificazione del percorso robotico, fornito con la scelta dell’area di destinazione. Combinando l’effettore finale flessibile e il sistema di navigazione, il prototipo di broncoscopio robotico può raggiungere automaticamente la lesione bersaglio e fornire una guida visiva intraoperatoria per il campionamento della biopsia.
Conclusioni e prospettive future
In futuro, i ricercatori si concentreranno sulla riduzione del diametro al minimo dell’effettore finale e sull’adozione di moduli sostituibili per diverse esigenze chirurgiche. Il tutto esplorando nuove possibilità di comando per consentire al robot un movimento più flessibile nelle vie aeree e adottando algoritmi di intelligenza artificiale per realizzare una calibrazione automatica e intelligente. I risultati ottenuti portano a buone speranze per un suo utilizzo a breve nella realtà operatoria.