CYBERLEGs, gambe robotiche per tornare a camminare
Il progetto di ricerca CYBERLEGs è stato coordinato dall’Istituto di biorobotica della Scuola superiore Sant’Anna di Pisa


La perdita totale o parziale di un arto inferiore è una condizione disabilitante che compromette salute e benessere di molte persone nel mondo. Le cause di un’amputazione possono essere diverse: diabete, malattie vascolari, eventi traumatici, tumori o malformazioni congenite.
Si calcola che solo negli Stati Uniti, ogni anno, vi siano 150mila amputazioni di arto inferiore causate da patologie vascolari.
Tali amputazioni possono essere di differente livello: possono interessare il piede (amputazione digitale, transmetatarsale, di Lisfranc, di Chopart, di Pirogrof, di Syme, o disarticolazioni della caviglia), la gamba (transtibiale, disarticolazione del ginocchio), la coscia (transfemorale, che rappresenta il 20% di tutte le amputazioni), o il bacino (disarticolazione dell’anca, emipelvectomia).
Gli amputati transfemorali devono superare difficoltà dovute al fatto che ogni compito motorio legato alla deambulazione (camminare, salire o scendere le scale, alzarsi e sedersi) comporta un maggiore sforzo fisico (con un notevole consumo energetico, che aumenta con il livello dell’amputazione) e mentale (sforzo cognitivo).
Gli amputati transfemorali, infatti, hanno bisogno di maggiore concentrazione per camminare, dal momento che percepiscono una minore stabilità.
La maggior parte degli amputati vascolari non utilizza protesi, ricorrendo a soluzioni di ‘più facile utilizzo’ come la carrozzina. Ciò è dovuto al fatto che la maggior parte delle protesi per amputati transfemorali sono passive (non vi sono motori ai giunti) o semi-attive (protesi con ginocchio composto da un meccanismo frenante), ovvero non erogano la potenza meccanica necessaria al cammino e agli altri compiti di locomozione.
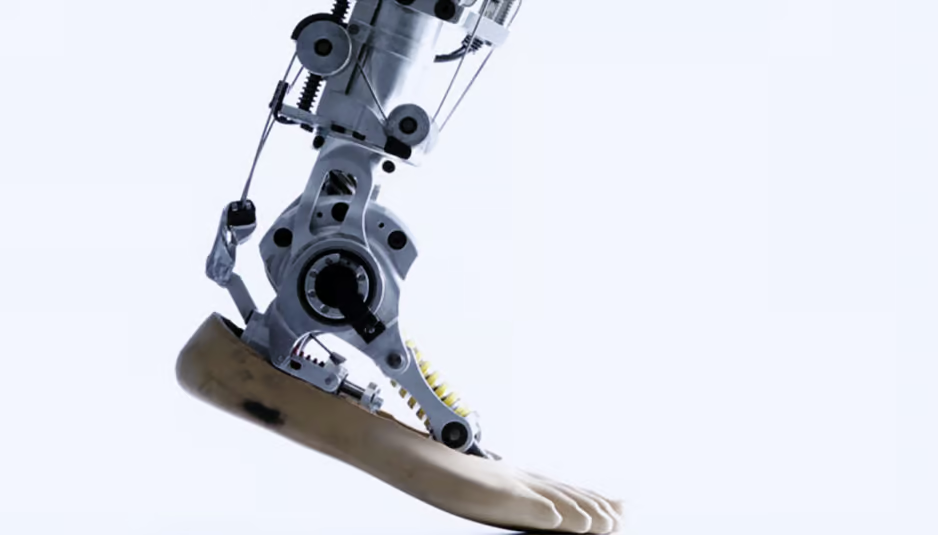
E’ per questo motivo che la ricerca sta spingendo verso la progettazione di protesi attive, che presentano motori nei giunti.
Il progetto di ricerca CYBERLEGs (acronimo di CYBERnetic LowEr-Limb CoGnitive Ortho-prosthesis), coordinato da Nicola Vitiello dell’Istituto di biorobotica della Scuola superiore Sant’Anna di Pisa e a cui ha preso parte anche il Centro Irccs Don Carlo Gnocchi di Firenze, dove sono stati presentati i prototipi, testati su 11 persone, si pone l’obiettivo di concepire e sviluppare nuove soluzioni ICT (ed in particolare robotiche) indossabili per migliorare la qualità della vita di amputati transfemorali vascolari. In particolare, l’obiettivo finale del progett CYBERLEGs è lo sviluppo di un sistema robotico indossabile – denominato orto-protesi – costituito da una protesi transfemorale attiva (con giunti robotizzati) ed un’ortesi attiva (meccanicamente accoppiata alla protesi) per provvedere assistenza motoria sia all’arto sano che all’anca dell’arto amputato.
L’ortesi attiva è concepita per essere modulare e si compone di due moduli. Il primo modulo (direttamente accoppiato alla protesi) è un’ortesi bilaterale per l’assistenza della flesso-estenssione dell’anca. Tale modulo è denominato Active Pelvis Orthosis (APO). Il secondo modulo è un’ortesi attiva monolaterale per l’assistenza della flesso estensione delle articolazioni di ginocchio e caviglia dell’arto sano ed è denominato Knee-Ankle-Foot Orthosis (KAFO).
L’orto-protesi permette all’amputato di svolgere compiti motori quali camminare (anche su superfici inclinate), salire/scendere gradini, alzarsi in piedi e sedersi con un ridotto sforzo fisico. Questo è possibile grazie al fatto che la protesi ha giunti attivi e l’ortesi attiva è in grado di fornire potenza meccanica alle rimanenti articolazioni dell’arto amputato e a quelle dell’arto sano.
In aggiunta, l’amputato può interagire con il sistema robotico in modo intuitivo (quindi con un basso sforzo mentale) perché il sistema di controllo di CYBERLEGs permette alla macchina di avere un comportamento semi-autonomo: una volta che la macchina identifica l’intento motorio dell’amputato attraverso una rete di sensori indossabili, i comandi motori agli attuatori della protesi e dell’ortesi sono generati attraverso l’utilizzo di differenti primitive motorie per i differenti compiti motori della locomozione.
Di seguito vengono presentate nel dettaglio tutte le caratteristiche del progetto: meccanica, sistema meccatronico, sistema di attuazione, sistema di controllo, algoritmi di controllo, sistema sensoriale e macchina a stati finiti.