Exo Glove Poly: guanto robotico per riacquisire il movimento manuale
Exo Glove Poly http://atlasofthefuture.org
Non solo protesi o braccia robotiche: ecco un guanto che potrebbe fare la differenza per i soggetti con disabilità motorie agli arti superiori (sia essa parziale o totale) per far fronte ai gesti quotidiani.
L’ Exo Glove Poly, che sarà disponibile dalla fine del 2017, è stato progettato e realizzato dalla Biorobotics Laboratory della Seoul National University.
Ogni anno, almeno 500.000 persone sono costrette all’uso di una sedia a rotelle; di queste, almeno la metà accusano infortuni alle mani.
Nonostante la disabilità, il sogno di queste persone è di vivere una vita quantomeno normale ed indipendente.
Kyujin Cho, Assistant Professor alla suddetta università, è lo sviluppatore del guanto Exo Poly, un soft robot in materiale polimerico che bypassa la paralisi alla mano, permettendo alle persone di raccogliere vari oggetti.

L’intero dispositivo è stato sviluppato dal team di Cho, grazie al contributo di studenti che hanno lavorato a stretto contatto con persone disabili. La speranza del team è che sempre più persone disabili possano raggiungere una condizione di vita più indipendente possibile.
IL DISPOSITIVO
Perchè l’utilizzo di un soft robot?
Le dita umane sono disposte in file in uno spazio anatomico decisamente denso, quindi un robot rigido aggiungerebbe complessità, nonché durezza all’intera struttura della mano, come già trattato da Close-Up in questo articolo.
D’altro canto, invece, una struttura priva di giunti e, quindi, più flessibile ha la potenzialità per essere indossata, sfruttando i giunti già presenti nello scheletro della mano.
Il guanto viene azionato grazie ad un interruttore collegato ad un sistema esterno ( contenente gli attuatori) mediante 3 cavi Bowden (simili a quelli che son utilizzati nei freni delle biciclette), con all’interno 2 “tendini” per ciascun cavo: un lato è collegato all’attuatore, mentre l’altro tra il metacarpo e l’articolazione del polso. I tendini interni vengono poi collegati al dito.

http://www.mauroalfieri.it
Ciò permette non solo di controllare le singole dita, ma anche di isolale dalle articolazioni del polso e del gomito.
Si tratta dunque di un robot privo di esoscheletro, che deve impegnarsi a riprodurre le azioni dei muscoli dell’avambraccio che controllano i muscoli, i tendini e il sistema delle puleggie (delle guaine fibrose canaliformi che avvolgono in vari punti il tendine flessore del dito, mantenendolo accollato all’osso) della mano.

http://biorobotics.cafe24.com
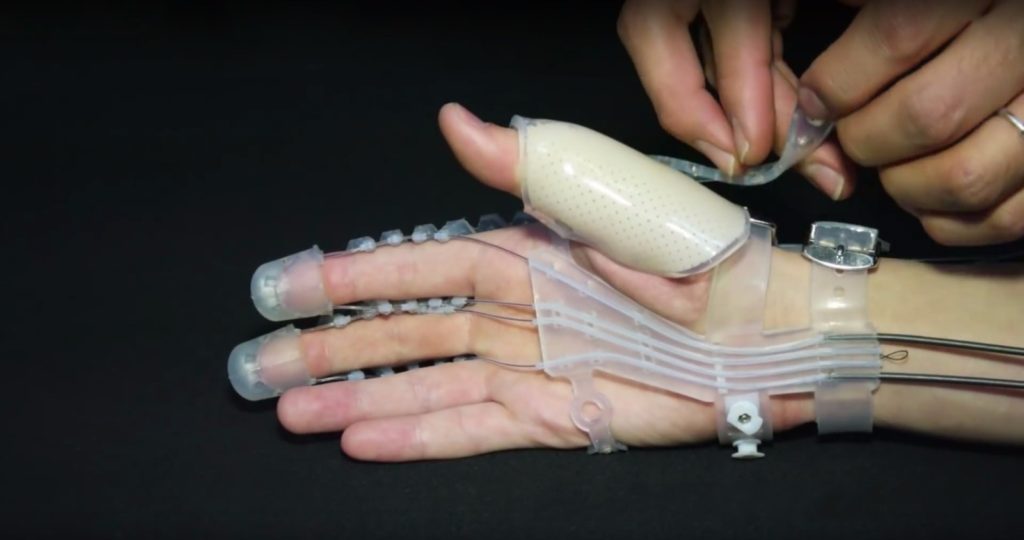
Il guanto, impermeabile, è costituito da 3 dita: pollice, indice e medio.
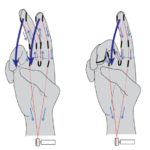
Sul dorso delle dita sono collegati i “tendini” dei muscoli estensori(verde) e sul lato inferiore quelli per i muscoli flessori (rosso), grazie a dei fili di materiale inestensibile.
Imitando l’anatomia umana, il guanto è stato ideato sul Soft Tendon Routing System, con due “tendini” per ciascun dito, per conferire una sufficiente tensione e per creare le giuste traiettorie delle dita, cambiandone la lunghezza e la posizione.
Non solo: viene eliminata la pre-tensione dei “tendini” (necessaria in sistemi tendinei convenzionali per mantenere rigidità articolare) e minimizzato il suo conseguente attrito, che potrebbe provocare inefficienza e mancata sicurezza per l’utente.
Come conferire forza alle dita del guanto?
Il meccanismo è quello dei sistemi meccanici sottoattuati, ovvero un sistema che possiede un minor numero di attuatori (ingressi di controllo del dispositivo) rispetto ai suoi gradi di libertà, che consente una salda e stabile presa sugli oggetti.
Il meccanismo permette una regolazione della lunghezza dei “tendini” su più dita.
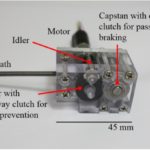
La flessione avviene grazie al motore che avvolge la bobina del tendine all’interno dei cavi, riducendone la lunghezza e applicando la giusta tensione per tenere saldo l’oggetto.
L’intero design dell’ Exo Glove è stato concepito per permettere una diversa regolazione delle dimensioni della mano.
Lo studio sull’affidabilità delle prestazioni del guanto è stato condotto confrontando gli stessi gesti di una persona sana e di una paralizzata: il risultato è stato che l’ Exo Glove ha permesso di recuperare completamente alcuni movimenti, come ad esempio il “raccogliere” oggetti di diversa dimensione.