iCub, il baby-robot ora sta in piedi
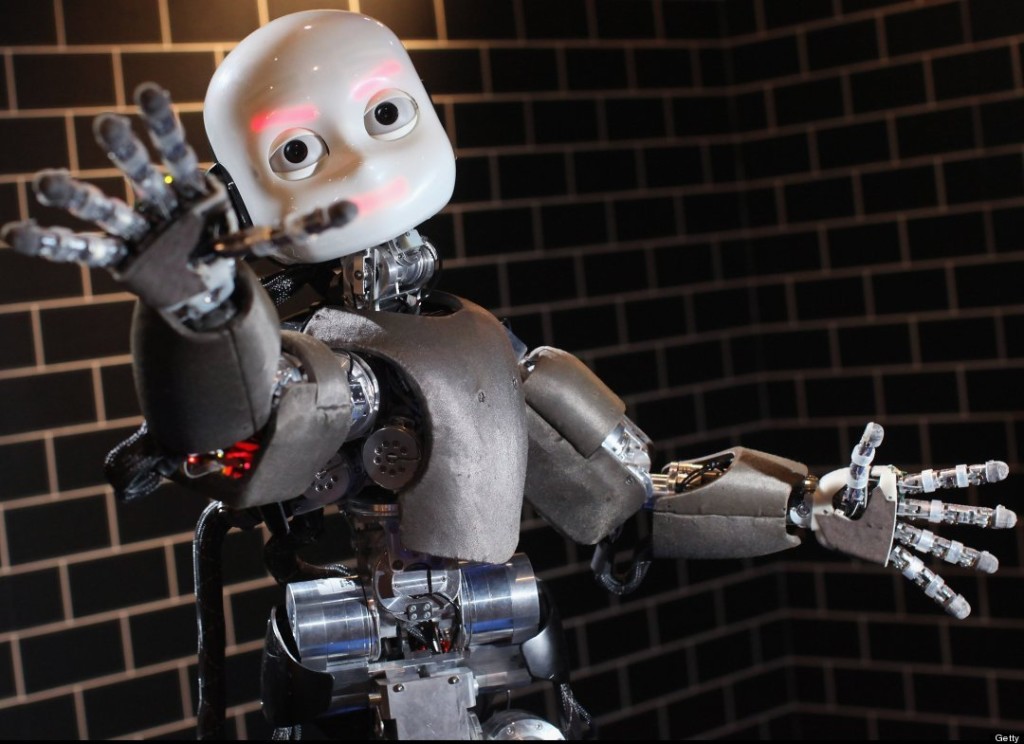
iCub è un robot androide costruito dall’Istituto Italiano di Tecnologia (IIT) di Genova. E’ alto 104 cm e pesante 22 kg e ricorda, per estetica e funzionalità, un bambino di circa quattro anni.
iCub è stato sviluppato congiuntamente al RobotCub Consortium, una società mista di alcune università europee. Il maggiore scopo di questa piattaforma informatica e hardware è quella di studiare la cognizione, attraverso l’implementazione di algoritmi motivati dalla biologia.
Il progetto è open-source sia per il software disponibile gratis e non criptato, che per la parte hardware, approfonditamente descritta nelle sue componenti, con pezzi reperibili sul mercato.
Caratteristiche:
53 gradi libertà di movimento
- 7 per ogni braccio robotico
- 9 per ogni mano robotica (3 per il pollice, 2 per l’indice, 2 per il dito medio, 1 per la coppia anulare-mignolo, 1 per l’abduzione/adduzione)
- 6 per i movimenti della testa
- 3 per il torace e la colonna vertebrale
- 6 per ogni gamba robotica
Capacità
- Gattonare (crawling).
- Funzioni basiche di processamento visivo.
- Sensori di basso livello per il controllo del movimento oculare, inerziale corporeo e della propriocettività.
- Telecamera ad alta risoluzione, che può ritrasmettere le immagini.
- Buone abilità di manipolazione destrimana.
- ITALK: programmi per l’apprendimento progressivo della lingua da parte del robottino, in modo casuale e oggetto e situazione-correlato
Il robot umanoide ora sta imparando a stare in piedi e a mantenere l’equilibrio anche nell’interazione fisica con le persone. Grazie alla pelle artificiale che gli permette di avere 4000 punti sensibili su tutto il corpo, è in grado di misurare in ogni istante i contatti e le forze che riceve dall’esterno, rispondendo con movimenti adeguati a mantenere l’equilibrio.
Queste nuove capacità saranno utili quando, nel prossimo futuro, iCub coabiterà con l’uomo negli ambienti domestici e dovrà muoversi in maniera sicura per sé e per gli altri. Quest’ultimo risultato è stato raggiunto grazie agli sforzi dei ricercatori di IIT e, in particolare, al Progetto Europeo Codyco, coordinato da Francesco Nori, del dipartimento di Robotics, Brain and Cognitive Sciences di IIT