Credits: Rai News- https://www.rainews.it/tgr/piemonte/video/2023/12/terzo-braccio-robotico-scuola-santanna-di-pisa-74bfa1e2-79a4-41db-9e0f-8357a0f99548.html
Il Terzo Braccio è una ricerca pubblicata sul Science Robotics condotta tra Italia e Svizzera da un gruppo di ricercatori guidato dal Politecnico Federale svizzero di Losanna a cui ha contribuito anche la Scuola Superiore Sant’Anna di Pisa. Si tratta di un arto robotico che potrà essere utilizzato in maniera del tutto naturale. Esso rappresenta un meraviglioso strumento per contrastare alcune disabilità e potrà essere impiegato anche in alcuni contesti lavorativi.
La robotica applicata al corpo umano sta concentrandosi verso quello che è definito come “l’uomo aumentato”. Il politecnico di Losanna, in Svizzera, ha messo a punto un terzo braccio robotico in grado di lavorare in maniera del tutto autonoma utilizzando soltanto le contrazioni del diaframma.
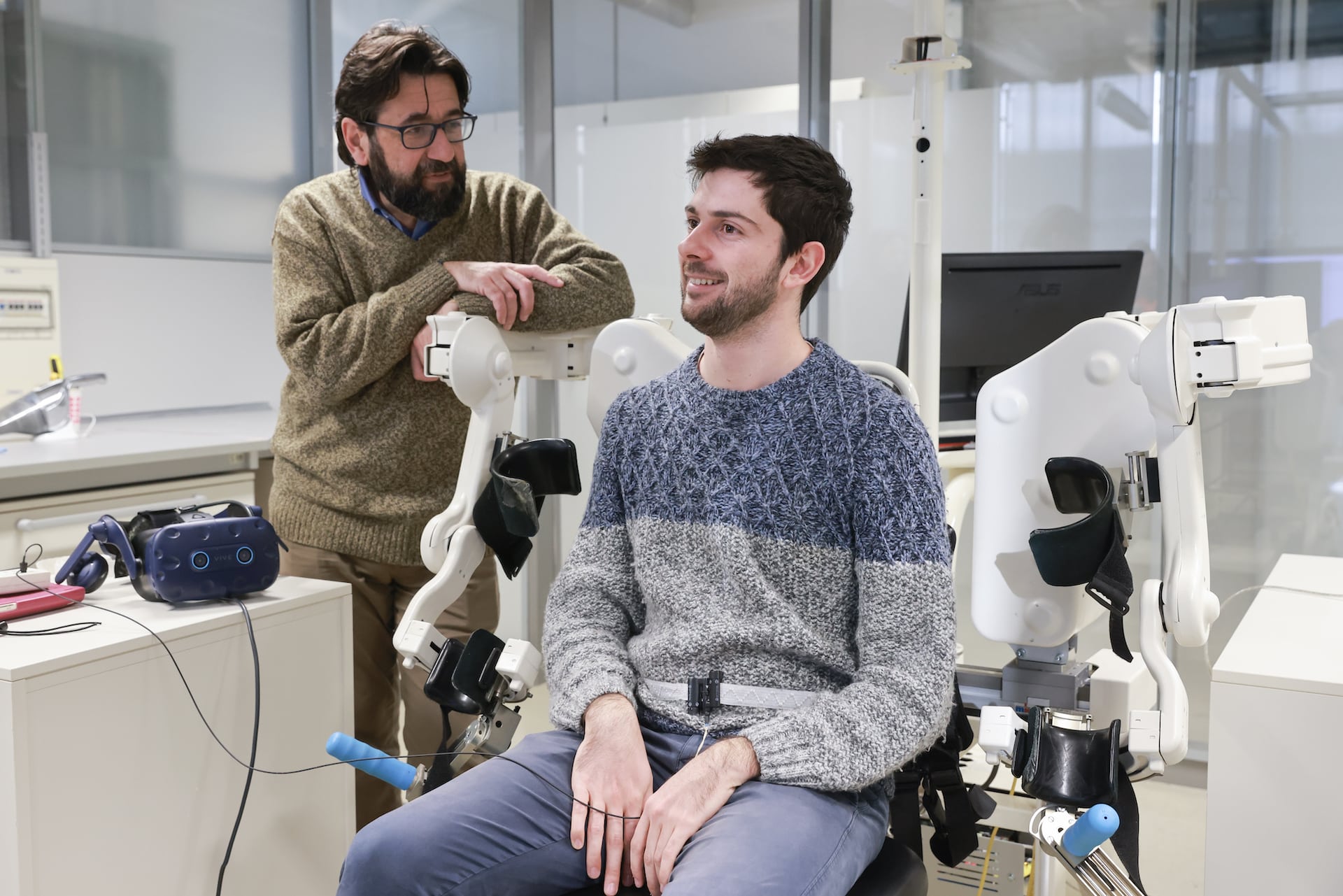
Si tratta di una fascia, che avvolge il torace, a cui è attaccato un braccio robotico. Quest’ultimo possiede una mano simmetrica a sei dita, in modo da evitare qualsiasi pregiudizio verso la mano destra o sinistra. Per fare in modo che il movimento del braccio meccanico sia controllato in modo naturale, i ricercatori hanno costruito un ambiente virtuale in cui l’individuo muove il terzo braccio. Inoltre leggendo i diagrammi delle onde celebrali vengono monitorati i movimenti del diaframma, in modo da istruire la macchina a muoversi in risposta alle sollecitazioni.
L’utente indossa dunque un visore e una cintura che misura il movimento del diaframma; nel mondo virtuale la persona vede tre braccia. La destra, la sinistra e il braccio centrale con la mano a sei dita perfettamente simmetrica. Gli esperimenti sono stati un successo, i soggetti riuscivano a controllare bene il terzo braccio in tempi brevi.
I bracci robotici si affacciano al mondo delle neuroscienze e della robotica, offrendo potenziali strumenti per le attività quotidiane. Nascono così nuove sfide per le strategie di controllo sensomotorio e le interfacce uomo-macchina. La sfida consiste nel consentire agli utenti di controllare abilmente il terzo braccio senza ostacolare le loro funzioni esistenti.
I ricercatori hanno valutato un’interfaccia (uomo-macchina) motorio multimodale basata sul rilevamento dello sguardo e sulla respirazione diaframmatica in una piattaforma neurorobotica modulare appositamente progettata che integra la realtà virtuale e un esoscheletro bilaterale dell’arto superiore. I risultati mostrano che l’interfaccia proposta non interferisce con l’esplorazione vocale o visiva e che può essere utilizzata per controllare un braccio virtuale extra indipendentemente da quelli biologici o in coordinamento con essi.
I partecipanti hanno mostrato miglioramenti significativi nelle prestazioni con l’allenamento quotidiano e il mantenimento dell’apprendimento, senza ulteriori miglioramenti quando è stato fornito feedback tattile artificiale. Come prova finale del concetto, i partecipanti ingenui ed esperti hanno utilizzato una versione semplificata dell’interfaccia per controllare un braccio indossabile. L’analisi ha indicato come può essere controllato efficacemente i bracci robotici. L’osservazione che gli utenti esperti hanno raggiunto un tasso di successo superiore del 22,2% rispetto a quello degli utenti ingenui, combinato con il risultato che gli utenti ingenui hanno mostrato tassi di successo medi del 74% quando hanno utilizzato per la prima volta il sistema, conferma la fattibilità sia del sistema basato sulla realtà virtuale.
I risultati mettono in evidenza come il nostro cervello impara molto rapidamente a utilizzare uno strumento del genere senza interferire con altre funzionalità. Questo è un argomento di frontiera per lo sviluppo di nuovi arti robotici indossabili da utilizzare in compiti particolari. La ricerca ha quindi dimostrato come il sistema nervoso di individui sani è capace di accettare l’esistenza di un terzo braccio robotico e può imparare a muoverlo in maniera intuitiva.
Si vuole così sfidare il nostro cervello a fare qualcosa di completamente nuovo. Utilizzando queste conoscenze i ricercatori possono quindi sviluppare dispositivi di assistenza per persone con disabilità o protocolli di riabilitazione dopo un ictus.
{kind=link}
{kind=link}
{kind=link}
{kind=link}