
SIRSlab e i robot indossabili che aiutano la vita dei disabili
Sogna di realizzare robot indossabili, che assumono forme di anelli e bracciali, in grado di aiutare chi non può muovere...
Sogna di realizzare robot indossabili, che assumono forme di anelli e bracciali, in grado di aiutare chi non può muovere...
La tac dell'Istituto Ortopedico Rizzoli fotograferà tridimensionalmente l'osso del paziente da riprodurre con la stampante 3D. Le immagini verranno inviate...
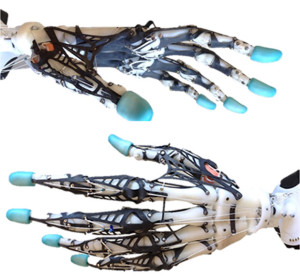
Un braccio robotico può essere volto alla precisione, alla potenza, compiendo movimenti artificiosi ma estremamente efficienti. Oppure può imitare un...

web.mit.edu MIT's Global Engineering and Research Lab - GEAR Lab – con sede presso il dipartimento di ingegneria meccanica del...
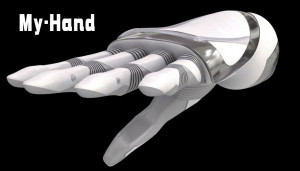
Pronta alla sperimentazione, My-Hand, la nuova mano bionica interamente made in Italy che ridona il tatto e non ha bisogno di...

Un nuovo ed innovativo braccio robotico comandato direttamente col pensiero grazie a microelettrodi impiantati nel cervello ha dato la possibilità...

La perdita totale o parziale di un arto inferiore è una condizione disabilitante che compromette salute e benessere di molte...

Fino ad ora, le interfacce cervello-macchina consentivano il controllo esclusivo di un singolo arto, ora un gruppo di ricercatori, tramite nuovi...