Un ragno robotico per la microchirurgia e l’endoscopia del futuro

I soft robot, grazie alla loro versatilità applicativa, stanno catturando sempre più l’interesse degli esperti del settore. La funzionalità di tali dispositivi dipende dalla loro struttura, dai materiali utilizzati e, quindi, dal metodo di fabbricazione. I ricercatori del Wyss Institute, dell’ Harvard SEAS e della Boston University hanno realizzato un nuovo processo per la fabbricazione dei soft materials dato dalla combinazione di tre diverse tecnologie di produzione. Per illustrare la validità del metodo, il team ha ideato un ingegnoso soft robot multifunzionale a forma di ragno e di dimensione millimetrica.
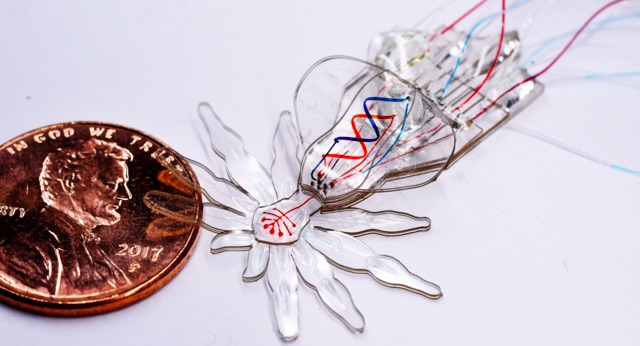
Le dimensioni ridotte e la flessibilità di questo ragno robotico potrebbero consentire di perfezionare pratiche come l’endoscopia e la microchirurgia.
Una nuova tecnica di produzione
{kind=link}
Abbiamo già visto come la crescente necessità dell’impiego di robot nelle attività sociali in ambienti non strutturali stia portando gli esperti del settore a focalizzare il proprio interesse sulla soft robotica. Questa frontiera tecnologica supera la struttura rigida dei robot a favore di parti robotiche morbide e facilmente malleabili, capaci di adattarsi a vari contesti. Per quanto riguarda le applicazioni medicali ricordiamo, ad esempio, il soft robot impiantabile in grado di ripristinare l’insufficienza cardiaca.
Gli attuali soft robot hanno dimensioni dell’ordine del centimetro e generalmente possiedono un solo un grado di libertà.
Sviluppando una nuova tecnologia ibrida denominata MORPH (Microfluidic Origami for Reconfigurable Pneumatic/Hydraulic), i ricercatori di Harvard e della Boston University hanno realizzato un minuscolo soft robot con diciotto gradi di libertà, che comprendono modificazioni nella struttura, nel movimento e nel colore. Il robot, costituito interamente da gomma siliconica, è ispirato al ragno pavone, un aracnide originario dell’Australia. Il primo autore del paper riportante i dettagli dello studio, pubblicato in Advanced Materials, è l’italiano Tommaso Ranzani.
La creazione del ragno robotico
Il team ha inizialmente utilizzato una tecnica litografica per generare dodici strati di silicone che, insieme, danno vita alla struttura monolitica che costituisce la base del robot. Ogni strato è stato tagliato con precisione con una tecnica di microlavorazione laser e quindi incollato a quello sottostante per creare la struttura 3D del dispositivo.
La chiave per trasformare questa struttura intermedia nel progetto finale è una rete di canali microfluidici cavi integrata nei singoli strati. La forma finale del ragno robotico è ottenuta attraverso un sistema di auto-piegatura pressurizzata. Iniettando nei canali microfluidici una resina indurente, è possibile di bloccare i singoli strati in uno stato deformato. In questo modo, ad esempio, l’addome gonfio del ragno e le gambe ricurve verso il basso possono diventare caratteristiche permanenti.
Possiamo controllare con precisione questo processo di piegatura variando lo spessore e la consistenza relativa del materiale siliconico adiacente ai canali attraverso diversi strati o mediante il taglio laser a diverse distanze dai canali. Durante la pressurizzazione, i canali funzionano come attuatori che inducono un cambiamento strutturale permanente.
Dichiara Ranzani.
Il progetto dimostra come la natura possa essere di grande ispirazione per trovare nuove soluzioni tecnologiche per l’industria e la ricerca. Altri esempi sono la pelle artificiale ispirata a quella dei polpi e l’adesivo medicale ispirato ad una particolare lumaca.