Riprodurre il movimento del cuore con un robot esapode

I dispositivi cardiaci stanno diventando sempre più complicati e avanzati a causa del progresso tecnologico e di norme sempre più precise e stringenti. A questo seguono degli esperimenti sempre più raffinati che si trovano a far fronte a sfide etiche e metodiche innovative, tra cui la simulazione dei movimenti cardiaci. È da molto tempo che si cerca uno strumento che permettesse di simulare il movimento del cuore nei suoi vari aspetti così da poter testare al meglio i dispositivi impiantabili per il cuore. A far fronte a questa mancanza è proprio la pubblicazione di Adrian Zurbuchen et al. in cui viene descritta una piattaforma robotica che permette di simulare la traiettoria di qualunque punto del cuore con sei gradi di libertà.

Dispositivi per il cuore
Il pacemaker cardiaco impiantabile è un dispositivo che viene impianto sottopelle nei pazienti affetti da patologie cardiache. Monitora continuamente l’attività del cuore in modo tale da intervenire in caso di necessità ripristinando l’attività elettrica cardiaca. Ci sono diversi dispositivi cardiaci impiantabili che richiedono fasi di test con studi e prove effettuate su un tessuto cardiaco in movimento.
Tipicamente si analizzano i metodi di ancoraggio sul cuore trascurando però fenomeni dinamici e il movimento nel suo complesso. Discorso analogo per i dispostivi di recupero dell’energia che permettono di ottenere energia dal movimento. Tipicamente sono testati su piattaforme meccaniche eccitati da sinusoidi ad alta frequenza ma unidirezionali e ben lontane da un test in vivo. Queste necessità portano spesso a fare test su pecore e maiali. Nonostante è riconosciuto che questi approcci offrono notevoli vantaggi da un punto di vista etico è auspicabile un calo delle sperimentazioni animali.
Il robot
È costituito da una piattaforma Stewart, o robot parallelo, controllata da 6 motori con un encoder a 10 bit. Il robot utilizza i 6 bracci per muovere la piattaforma sfruttando il lavoro simultaneo dei bracci anche se la loro posizione è indipendente l’una dall’altra. Sono connessi all’interfaccia Universal Motion Interfaces con un controller PXI. Il controllo è effettuato da un classico compensatore PID a circuito chiuso, integrato nel controller. Si aggiunge poi un software LabVIEW che va a costituire l’interfaccia grafica e permette di impostare i setpoint.
Sono possibili sei gradi di libertà, ovvero le tre traslazioni lungo x, y e z e le tre rotazioni rispettivamente roll, pitch e yaw. Permette movimenti con un’accelerazione di 20 m/s2 e un angolo di flessione massima di 19°. Ha una precisione nella traiettoria e nel posizionamento dei punti desiderati inferiore al quarto di millimetro e per la rotazione inferiore al quarto di grado. Complessivamente ha una base di 40×40 cm e supporta un carico massimo di 442 g.
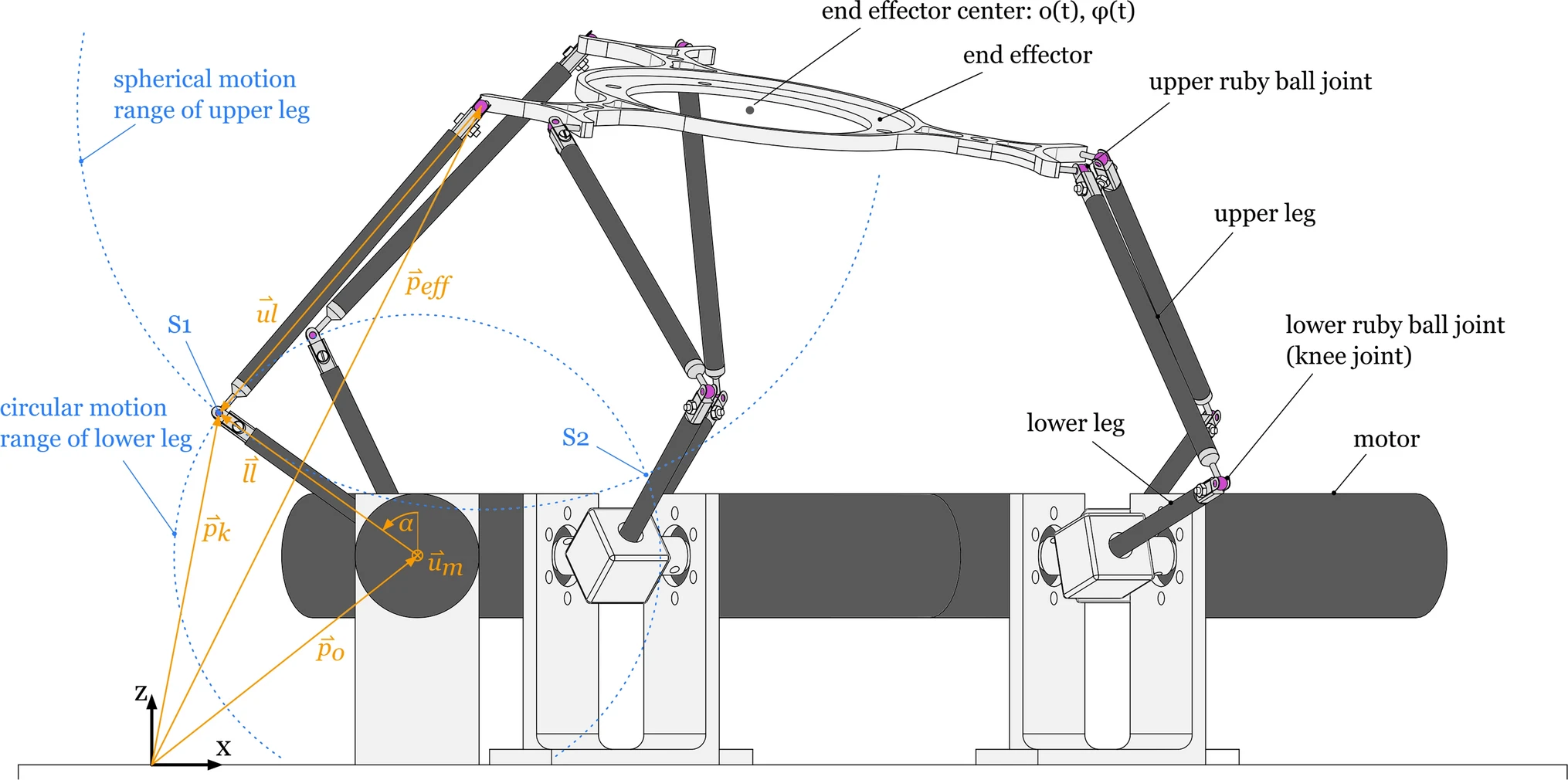
Per spostare la piattaforma seguendo la traiettoria o(t) e l’assetto φ(t) desiderati è necessario definire la posizione target e l’orientamento delle sei gambe e quindi degli attuatori. I giunti sono giunti sferici che consentono alla gamba superiore di ruotare liberamente su una sfera di centro la sua articolazione e raggio dato dalla sua lunghezza. Invece sul motore c’è un giunto cilindrico che permette una rotazione solo intorno l’asse del motore, ovvero l’estremità della gamba non può trovarsi che su una circonferenza data dal suo raggio e centrata sull’asse movente. Dovendo coincidere le estremità delle gambe superiore e inferiore la soluzione è determinata trovando l’intersezione delle due traiettorie.
Controller a ciclo chiuso
Si calcola la posizione del ginocchio con l’equazione vettoriale di chiusura:  . Si va poi a calcolare la funzione
. Si va poi a calcolare la funzione  in modo tale che il risolutore possa risolverla minimizzando l’output (α –> 0). Dei possibili risultati sarà valida soltanto la soluzione S1. Ripetendo il processo per i sei segmenti nel rispetto della traiettoria e dell’assetto imposti si ottiene la descrizione dell’angolo di rotazione nel tempo per tutti i motori.
in modo tale che il risolutore possa risolverla minimizzando l’output (α –> 0). Dei possibili risultati sarà valida soltanto la soluzione S1. Ripetendo il processo per i sei segmenti nel rispetto della traiettoria e dell’assetto imposti si ottiene la descrizione dell’angolo di rotazione nel tempo per tutti i motori.

Il controller considera ogni input che viene fornito come un punto fisso della traiettoria e cerca quindi i valori migliori per il movimento. Questo comporta però alcuni problemi di precisione quando aumenta il carico a cui è sottoposta la piattaforma e gli autori stessi suggeriscono di utilizzare dei meccanismi di compenso più avanzati che facciano riferimento anche ad un modello meccanico della parete cardiaca. Tuttavia, per carichi sufficientemente piccoli le traiettorie sono accettabili e questo porta alla possibilità di condurre esperimento ex-vivo su questa piattaforma. È anche suggerito di sfruttare di controller basati sul machine-learning per sfruttare il fatto che il ciclo cardiaco ripete una traiettoria prevedibile che potrebbe essere affinata sempre di più ciclo dopo ciclo.
Meccanica del cuore
Ogni ciclo cardiaco ha due fasi meccaniche principali: la diastole e la sistole. In diastole il muscolo cardiaco si rilassa mentre nella sistole si contrae. Gli eventi poi vengono ulteriormente separati dal momento che atri e ventricoli non lo fanno in modo sincrono ma nel modo che garantisce la maggior efficienza nella spinta del sangue lungo tutto l’albero circolatorio. Complessivamente il ciclo cardiaco viene diviso in quattro fasi.
Nella contrazione isovolumetrica si ha un aumento della pressione ventricolare. Quando questa supera la pressione aortica il sangue viene iniettato nell’aorta e si ha l’inizio della fase di eiezione rapida. A questa fase segue poi il rilasciamento isovulemetrico durante il quale si chiudono le semilunari e si rilascia il miocardio permettendo al sangue di riempire nuovamente gli atri. Segue poi l’ultima fase in cui c’è un rapido riempimento ventricolare e infine la sistole atriale che permette di spingere tutto il sangue dagli atri ai ventricoli. Successivamente riprende il ciclo. Il ripetersi di questo ciclo porta a movimenti precisi e ripetitivi della struttura cardiaca.

Utilizzando i dati acquisiti dall’imaging medicale è possibile ricostruire i movimenti cardiaci sfruttando i sei motori a un controller a ciclo chiuso. Il tutto è gestito da un’interfaccia grafica che monitora il funzionamento di ogni segmento del robot nel seguire i dati forniti. È quindi possibile riprodurre il movimento del cuore umano e di grandi animali con un’elevata accuratezza e buona riproducibilità. Questo sarà sicuramente udite nello sviluppo e nelle fasi di test dei dispositivi cardiaci. Inoltre, permetterà di ridurre le sperimentazioni animali.