Gli umanoidi sono dei robot in grado di svolgere una vasta gamma di compiti per interagire con gli esseri umani in contesti tra cui l’assistenza medica/infermieristica, l’industria e i servizi. Tali mansioni richiedono un aspetto il più simile possibile a quello umano per migliorarne l’efficienza e la qualità.
Per imitare l’aspetto degli esseri umani, i materiali di copertura degli umanoidi devono avere una consistenza realistica, il più simile possibile alla pelle umana. Per questa ragione un team di scienziati si occupa della creazione di un tessuto adatto a soddisfare queste richieste.
Dall’utilizzo di tessuti simili a quelli umani ci si aspetta che abbiano capacità di autoguarigione, poiché gli umanoidi coperti sono destinati a svolgere ruoli in ambienti di lavoro incerti e dinamici.
Negli anni si sono svolti tentativi ripetuti di creazione di pelle vivente con cui ricoprire i robot, purtroppo senza esito positivo. Sebbene la gomma siliconica, tradizionalmente utilizzata come materiale di copertura per gli umanoidi, abbia acquisito un aspetto simile a quello umano, manca di molte funzionalità della pelle vivente come la capacità di autoguarigione, capacità sempre più ricercata. Inoltre, a livello estetico non riesce ad imitare del tutto i dettagli come le rughe.
È importante sottolineare che gli equivalenti cutanei sono, tessuti in vitro, fabbricati utilizzando cellule viventi (fibroblasti, cheratinociti, ecc.) e hydrogel a matrice extracellulare (ECM) (collagene, ecc.); questi possono imitare caratteristiche cutanee uniche, come l’aspetto e la struttura interna, ottenendo così un tocco morbido e la capacità di autoguarigione. Gli equivalenti cutanei sono utilizzati come strumenti nella ricerca biologica attuale e come impianti medici per trattare ferite gravi e ustioni in pazienti umani.
Alcuni studi hanno anche dimostrato la capacità di autoriparazione in vitro di questi equivalenti cutanei dopo che si sono verificate ferite superficiali alla superficie interessata.
Tuttavia, è difficile fabbricare equivalenti cutanei in grado di coprire senza una soluzione nutritiva continua la superficie robotica essendo la struttura 3D con curve e irregolarità. Infatti, la maggior parte degli equivalenti cutanei sono derivati sotto forma di un foglio piatto 2D questo perché risulta difficile controllare la forma 3D dell’equivalente del derma.
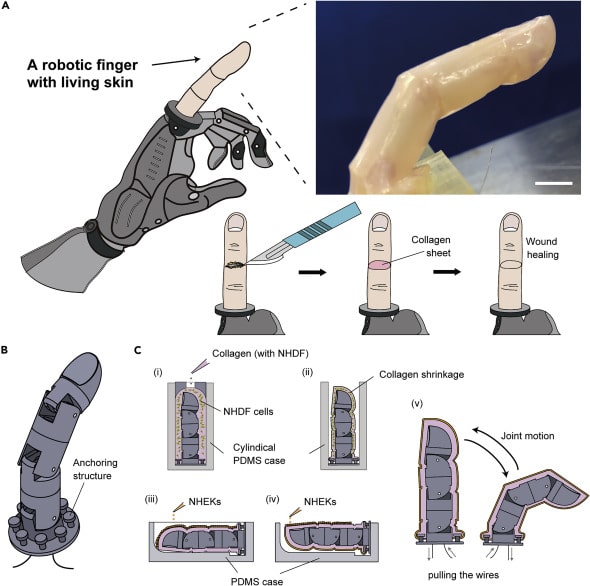
Come mostrato nelle figura qui sotto (B – C), la strategia per costruire l’equivalente cutaneo che copre il dito di un robot comprende due passaggi principali:
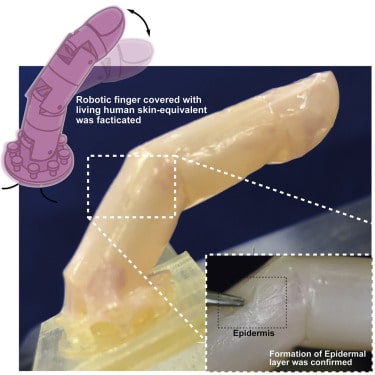
Per prima cosa, i ricercatori hanno immerso il dito robotico in un cilindro colmo di una soluzione di collagene e fibroblasti umani. Questa miscela si è adattata al dito ed è diventata la base per lo strato successivo, ovvero l’epidermide. La pelle creata è risultata, fin da subito, elastica ed in grado di adeguarsi alle posizioni create dal dito artificiale, ma molto più debole della pelle naturale.
Nonostante l’incredibile risultato che si è ottenuto da questo studio, la creazione di pelle vivente per gli umanoidi non presenta ancora tutte le caratteristiche richieste. Questo perché il tessuto creato dal team non può ancora vivere al di fuori della sua soluzione nutritiva e richiede di essere idratato costantemente. Attualmente, il team sta cercando di capire come superare questi limiti.
Quanto riportato dimostra, comunque, che c’è un cambio di rotta degno di nota dalla robotica classica alla robotica bioibrida volta all’utilizzo di materiali viventi per la copertura dei robot.
{kind=link}
{kind=link}
{kind=link}